Next: 3.2 Kinematic equations: displacements Up: 3. Fundamentals of Solid Previous: 3. Fundamentals of Solid Contents
Consider a 3D space with a given right-handed orthogonal coordinate system
 ,
,
 ,
,
 in directions 1, 2 and 3 (Figure 3.2).
In a right-handed coordinate system, the first element of the base
is your index finger, the second element of the base
is your middle finger, and the third element of the base
is your thumb (all in your right hand).
in directions 1, 2 and 3 (Figure 3.2).
In a right-handed coordinate system, the first element of the base
is your index finger, the second element of the base
is your middle finger, and the third element of the base
is your thumb (all in your right hand).
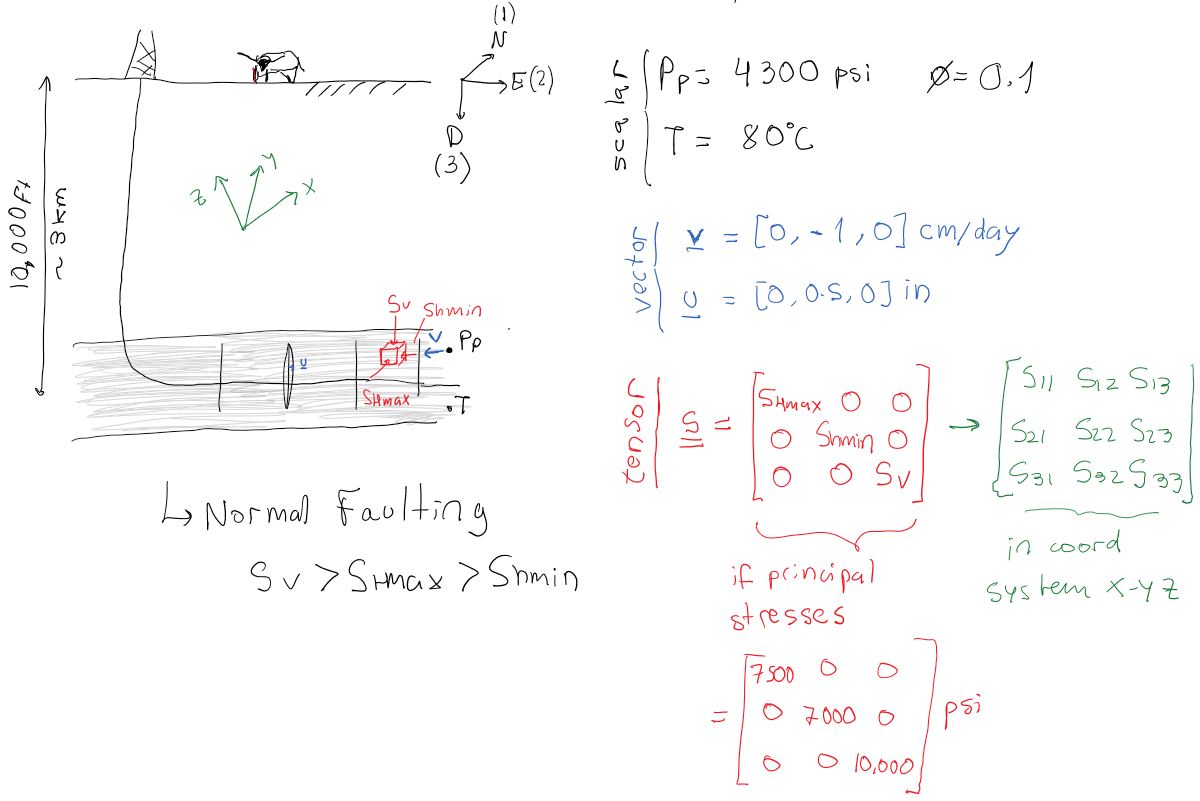
The number that represents the value of a scalar (such as temperature  or pore pressure
or pore pressure  ) at a given point
) at a given point
 is independent of the coordinate system orientation and origin (Figure 3.1).
However, the numbers that represent the value of a vector (such as velocity
is independent of the coordinate system orientation and origin (Figure 3.1).
However, the numbers that represent the value of a vector (such as velocity  or force
or force  ) or a tensor depend on the coordinate system.
A tensor, like stress, also depends on the coordinate system used to express its numerical values.
Read the values
) or a tensor depend on the coordinate system.
A tensor, like stress, also depends on the coordinate system used to express its numerical values.
Read the values  as the stress on face perpendicular to base vector
as the stress on face perpendicular to base vector
 in the direction of base vector
in the direction of base vector
 .
is positive if after a displacement
.
is positive if after a displacement  , points in opposite direction to
(Figure 3.2).
, points in opposite direction to
(Figure 3.2).
All stresses can be written as a matrix (Figure 3.2).
The diagonal terms correspond to normal stresses.
The off-diagonal terms correspond to shear stresses.
Off-diagonal stresses are symmetric
 (
( ) because of angular momentum equilibrium (the element does not spin around any axis).
Hence, the stress tensor is symmetric with respect to the diagonal (top-left to bottom-right).
) because of angular momentum equilibrium (the element does not spin around any axis).
Hence, the stress tensor is symmetric with respect to the diagonal (top-left to bottom-right).
![\includegraphics[scale=0.55]{.././Figures/split/4-3.pdf}](img284.svg) |
Since the stress tensor is symmetric and is composed by all real numbers, there exist 3 real-valued eigenvalues that we call principal stresses and denote
 .
Each principal stress (eigenvalue) is associated with a principal direction (eigenvector).
Principal directions are always perpendicular to each other in a cartesian coordinate system.
When we write the stress tensor in the coordinate system aligned with directions of the principal stresses, the stress tensor results in diagonal elements populated by the principal stresses and zeros in the off-diagonal places.
Usually, the principal stresses are ordered from top to bottom starting with
.
Each principal stress (eigenvalue) is associated with a principal direction (eigenvector).
Principal directions are always perpendicular to each other in a cartesian coordinate system.
When we write the stress tensor in the coordinate system aligned with directions of the principal stresses, the stress tensor results in diagonal elements populated by the principal stresses and zeros in the off-diagonal places.
Usually, the principal stresses are ordered from top to bottom starting with  at the top (Figure 3.3).
at the top (Figure 3.3).
![\includegraphics[scale=0.55]{.././Figures/split/4-4.pdf}](img286.svg) |
EXAMPLE 3.1: For the following stress tensor obtained for the Neuquen Basin: a) calculate the eigenvalues (principal stresses), b) calculate eigenvectors (principal directions), c) answer what the stress regime is, and d) calculate the angle between the North and the direction of  in clockwise direction.
in clockwise direction.
![$\displaystyle \underset{=}{\sigma} =
\left[
\begin{array}{ccc}
\sigma_{NN} ...
...ccc}
8580 & 100 & 0 \\
100 & 9900 & 0 \\
0 & 0 & 9000
\end{array} \right]$](img287.svg) psi
psi
Note: The stress tensor is written in the North-East-Down coordinate system.
SOLUTION
First, find an appropiate math solver that can calculate eigenvalues and eigenvectors (Python, Matlab, Wolfram Alpha, etc.)
We will use Wolfram Alpha online in this solution.
Go to https://www.wolframalpha.com/ and enter:
eigenvalues

The answer to this querry is (click in “approximate forms”):

and

a,b) The principal stresses are

Figuring out what are horizontal and vertical stresses depends on the eigenvectors.
First, let's start with the easiest one.
Eigenvector
 points straight in the downward direction, i.e., no horizontal component either in N or E directions (first two coordinates are zeros).
Hence,
points straight in the downward direction, i.e., no horizontal component either in N or E directions (first two coordinates are zeros).
Hence,
 is in the vertical direction and is
is in the vertical direction and is  .
The other two (
.
The other two ( and
and  ) are the horizontal stresses, where
) are the horizontal stresses, where
 and therefore
and therefore
 .
.
c) is the intermediate stress in this case, hence, this location is under strike-slip stress regime according to the Andersonian classification.
d) Eigenvector
 gives the direction of
.
Let's read the vector
gives the direction of
.
Let's read the vector  according to the NED coordinate system: it goes North +0.0753277 units, it goes East +1.0 units, it goes Down 0.0 units.
Drawing this in a 3D coordinate system results in a vector in the NE horizontal plane pointing mostly towards the East.
The angle between the East axis and the vector is
according to the NED coordinate system: it goes North +0.0753277 units, it goes East +1.0 units, it goes Down 0.0 units.
Drawing this in a 3D coordinate system results in a vector in the NE horizontal plane pointing mostly towards the East.
The angle between the East axis and the vector is
 rad
rad , i.e.,
, i.e.,
 from the East axis towards the North axis.
Hence, the angle between the North and the vector is
from the East axis towards the North axis.
Hence, the angle between the North and the vector is
 .
.

Equilibrium of stresses requires summation of forces in all directions to be zero when the object is not moving (no acceleration  , thus
, thus
 ).
Consider the schematic in Figure 3.4.
Summation of forces in direction 1, where the term
).
Consider the schematic in Figure 3.4.
Summation of forces in direction 1, where the term
 is the body force component, proportional to the solid mass density
is the body force component, proportional to the solid mass density  and volume
and volume  , and the acceleration component
, and the acceleration component  , requires
, requires
![\begin{displaymath}\begin{array}{rcl}
\sum F_1 & = & 0 \\
\sum F_1 & =
& + S_{1...
...] dx_1 dx_2 \\
& & - \rho (dx_1 dx_2 dx_3) b_1 = 0
\end{array}\end{displaymath}](img310.svg) |
which eventually reduces to the following equation when canceling terms and dividing by the element volume

 |
(3.1) |
![\includegraphics[scale=0.65]{.././Figures/split/4-5.pdf}](img313.svg) |
A generalization of equilibrium in all directions with all stresses (Figure 3.2) yields the Cauchy's equilibrium equations:
Consider a half-space where the surface coincides with the origin of the coordinate system and gravity  points in direction 3, hence
points in direction 3, hence  in Eq. 3.2.
We assume infinite extension in directions 1 and 2, therefore there are no variations in directions 1 and 2, such that
in Eq. 3.2.
We assume infinite extension in directions 1 and 2, therefore there are no variations in directions 1 and 2, such that
 .
Notice there are 6 unknowns and 3 equations in Eq. 3.2 (remember
).
The only equation we can solve is the third one.
Integration of the third equation yields the (vertical) stress
.
Notice there are 6 unknowns and 3 equations in Eq. 3.2 (remember
).
The only equation we can solve is the third one.
Integration of the third equation yields the (vertical) stress  ,
,
 |
(3.3) |
equivalent to Eq. 2.11.
![\includegraphics[scale=0.45]{.././Figures/split/4-7.pdf}](img318.svg) |
You may wonder “what about  and
and  ?
The horizontal stresses cannot be determined with the current equations.
The solution to this problem will be developed in section 3.3.4.
?
The horizontal stresses cannot be determined with the current equations.
The solution to this problem will be developed in section 3.3.4.
Figure 3.6 shows an example of an arbitrary shaped continuous solid subjected to external stresses  , external forces , body forces
, external forces , body forces  , and displacement constraints (bottom fixture).
As highlighted before, notice that there are 6 unknowns (9 unknowns if displacements are included) and 3 equations in Cauchy's equations of equilibrium (Eq. 3.2).
The solution of a general problem with arbitrary boundary conditions requires more equations to have a determined problem (as many equations as unknowns).
The solution of such problem requires knowledge of the material properties.
We need equations that relate displacement to stresses. These equations divide in two types:
, and displacement constraints (bottom fixture).
As highlighted before, notice that there are 6 unknowns (9 unknowns if displacements are included) and 3 equations in Cauchy's equations of equilibrium (Eq. 3.2).
The solution of a general problem with arbitrary boundary conditions requires more equations to have a determined problem (as many equations as unknowns).
The solution of such problem requires knowledge of the material properties.
We need equations that relate displacement to stresses. These equations divide in two types:
![\includegraphics[scale=0.55]{.././Figures/split/4-8.pdf}](img323.svg) |